Mean Absolute Error (MAE)
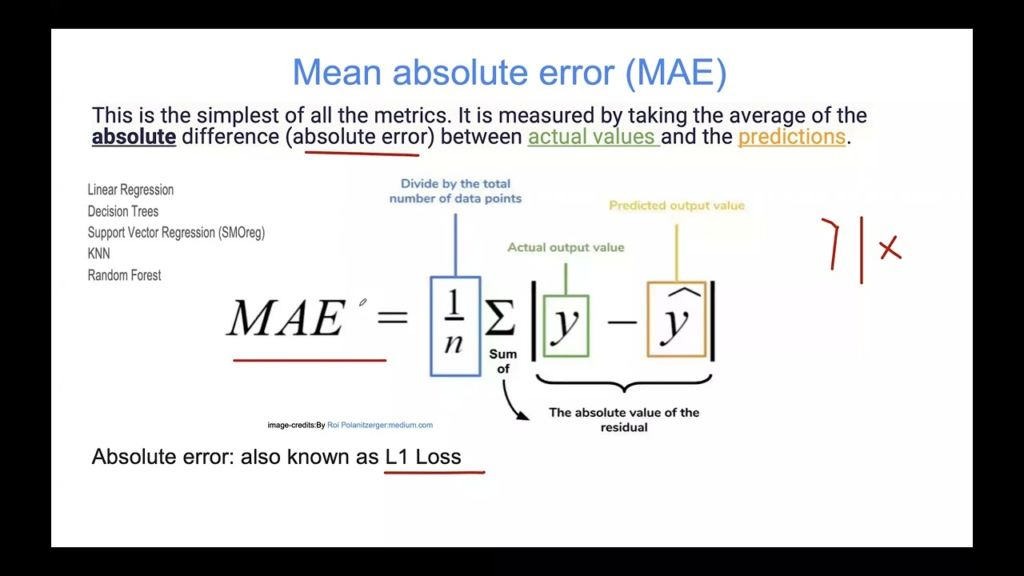
Mean Absolute Error (MAE) is a fundamental metric in machine learning for evaluating regression models. It measures the average magnitude of errors in predictio...
6 min read
MAE
Regression
+3
Mean Average Precision (mAP) is a comprehensive metric evaluating object detection models’ ability to accurately detect and localize objects in images.
Mean Average Precision (mAP) is an essential performance metric in the domain of computer vision, particularly for evaluating object detection models. It provides a single scalar value that encapsulates a model’s ability to accurately detect and localize objects within images. Unlike straightforward accuracy metrics, mAP considers both the presence of correctly identified objects and their localization accuracy, typically expressed through bounding box predictions. This makes it a comprehensive measure for tasks requiring precise detection and localization, such as autonomous driving and surveillance systems.
Average Precision (AP):
Precision-Recall Curve:
Intersection over Union (IoU):
Confusion Matrix Components:
Thresholds:
To calculate mAP, follow these steps:
Generate Predictions:
Set IoU and Confidence Thresholds:
Evaluate Predictions:
Compute Precision and Recall:
Plot Precision-Recall Curve:
Calculate Average Precision (AP):
Compute mAP:
Performance Evaluation:
mAP is widely used to evaluate object detection algorithms like Faster R-CNN, YOLO, and SSD. It provides a comprehensive measure that balances precision and recall, making it ideal for tasks where both detection accuracy and localization precision are critical.
Benchmarking Models:
mAP is a standard metric in benchmark challenges such as PASCAL VOC, COCO, and ImageNet, allowing consistent comparison across different models and datasets.
Autonomous Vehicles:
Object detection is crucial for identifying and localizing pedestrians, vehicles, and obstacles. High mAP scores indicate reliable object detection systems that can enhance safety and navigation in autonomous vehicles.
Surveillance Systems:
Accurate object detection with high mAP is important for security applications that require monitoring and identifying specific objects or activities in real-time video feeds.
AI-Powered Applications:
mAP serves as a critical metric for evaluating AI models in automated systems requiring precise object recognition, such as robotic vision and AI-driven quality control in manufacturing.
Chatbots and AI Interfaces:
While not directly applicable to chatbots, understanding mAP can aid in developing AI systems that integrate visual perception capabilities, enhancing their utility in interactive and automated environments.
To enhance the mAP of a model, consider the following strategies:
Data Quality:
Ensure high-quality, well-annotated training datasets that accurately represent real-world scenarios. Quality annotations directly affect the model’s learning and evaluation phases.
Algorithm Optimization:
Choose state-of-the-art object detection architectures and fine-tune hyperparameters to improve model performance. Continuous experimentation and validation are key to achieving optimal results.
Annotation Process:
Use precise and consistent annotation practices to improve ground truth data, which directly impacts model training and evaluation.
IoU and Threshold Selection:
Experiment with different IoU and confidence thresholds to find the optimal balance for your specific application. Adjusting these parameters can enhance model robustness and accuracy.
By understanding and leveraging mAP, practitioners can build more accurate and reliable object detection systems, contributing to advancements in computer vision and related fields. This metric serves as a cornerstone for evaluating the effectiveness of models in identifying and localizing objects, thereby driving innovation in areas such as autonomous navigation, security, and beyond.
Mean Average Precision (MAP) is a crucial metric in evaluating the performance of information retrieval systems and machine learning models. Below are some significant research contributions that delve into the intricacies of MAP, its computation, and applications across various domains:
Efficient Graph-Friendly COCO Metric Computation for Train-Time Model Evaluation
Authors: Luke Wood, Francois Chollet
This research addresses the challenges of evaluating COCO mean average precision (MAP) within modern deep learning frameworks. It highlights the need for a dynamic state to compute MAP, reliance on global dataset-level statistics, and managing varying numbers of bounding boxes. The paper proposes a graph-friendly algorithm for MAP, enabling train-time evaluation and improving the visibility of metrics during model training. The authors provide an accurate approximation algorithm, an open-source implementation, and extensive numerical benchmarks to ensure the accuracy of their method. Read the full paper here
Fréchet Means of Curves for Signal Averaging and Application to ECG Data Analysis
Author: Jérémie Bigot
This study explores signal averaging, particularly in the context of computing a mean shape from noisy signals with geometric variability. The paper introduces the use of Fréchet means of curves, extending the traditional Euclidean mean to non-Euclidean spaces. A new algorithm for signal averaging is proposed, which does not require a reference template. The approach is applied to estimate mean heart cycles from ECG records, demonstrating its utility in precise signal synchronization and averaging. Read the full paper here
Mean Values of Multivariable Multiplicative Functions and Applications
Authors: D. Essouabri, C. Salinas Zavala, L. Tóth
The paper utilizes multiple zeta functions to establish asymptotic formulas for the averages of multivariable multiplicative functions. It extends the application to understanding the average number of cyclic subgroups in certain mathematical groups and multivariable averages associated with the least common multiple (LCM) function. This research is significant for those interested in mathematical applications of MAP. Read the full paper here
More Precise Methods for National Research Citation Impact Comparisons
Authors: Ruth Fairclough, Mike Thelwall
This paper introduces methods to analyze research papers’ citation impacts, adjusting for skewed data distributions. It compares simple averages with geometric means and linear modeling, recommending geometric means for smaller samples. The research focuses on identifying national differences in average citation impacts, applicable in policy analysis and academic performance benchmarking. Read the full paper here
Mean Average Precision (mAP) is a performance metric that evaluates object detection models in computer vision. It measures how well a model can identify and localize objects, considering both detection accuracy and precision of object localization.
mAP is calculated by computing the Average Precision (AP) for each class using precision-recall curves and Intersection over Union (IoU) thresholds, then averaging the AP scores across all classes.
mAP provides a comprehensive assessment of an object detection model, balancing both detection and localization accuracy, making it essential for benchmarking and improving AI systems in applications like autonomous vehicles and surveillance.
mAP is widely used in evaluating object detection models for autonomous driving, surveillance systems, AI-powered manufacturing, and information retrieval tasks such as document and image search.
To improve mAP, focus on high-quality annotated datasets, optimize detection algorithms, fine-tune model thresholds, and ensure robust training and validation practices.
Discover FlowHunt’s platform for designing smart chatbots and AI tools. Connect intuitive blocks and automate your ideas with ease.
Mean Absolute Error (MAE) is a fundamental metric in machine learning for evaluating regression models. It measures the average magnitude of errors in predictio...
Discover the importance of AI model accuracy and stability in machine learning. Learn how these metrics impact applications like fraud detection, medical diagno...
Top-k accuracy is a machine learning evaluation metric that assesses if the true class is among the top k predicted classes, offering a comprehensive and forgiv...
